Autonome Navigation in Hochrisiko-Umgebungen erfordert Präzision bei der Sensorik
 Der Übergang von experimenteller Forschung und Entwicklung zur Massenbereitstellung autonomer Plattformen beschleunigt sich. Die Autonomie hat sich über das vorhersehbare Labor oder kontrollierte Umgebungen hinaus erweitert.
Der Übergang von experimenteller Forschung und Entwicklung zur Massenbereitstellung autonomer Plattformen beschleunigt sich. Die Autonomie hat sich über das vorhersehbare Labor oder kontrollierte Umgebungen hinaus erweitert.
Ingenieure und Innovatoren erweitern die Grenzen dessen, was Maschinen erreichen können, indem sie autonome Systeme in den unwirtlichsten Umgebungen der Erde einsetzen – vom erdrückenden Druck der Tiefsee bis zum gefährlichen, unvorhersehbaren Gelände abgelegener Industriestandorte. Hinzu kommt die wachsende Nachfrage nach autonomen Weltraumfahrzeugen und Robotik, und die Perspektiven sind enorm.
Damit diese Maschinen ohne menschliches Eingreifen erfolgreich arbeiten können, benötigen sie mehr als nur räumliches Bewusstsein. Sie müssen die auf sie einwirkenden physikalischen Kräfte in Echtzeit verstehen, um sekundenschnelle Sicherheitsentscheidungen zu treffen. Sie benötigen präzise Sensorfähigkeiten, die für den Einsatz in gefährlichen Umgebungen ausgelegt sind.
Interface bietet robuste Wägezellen und mehrachsige Krafttechnologien, die in operative Systeme integriert werden, um die Anwendungen autonomer Plattformen in extremen Umgebungen zu erweitern. Wie in unserer neuesten Fallstudie Autonome Systeme in rauen Umgebungen erfordern exakte Kraftmessung beschrieben, hat die Autonomie eine breite Palette von Anwendungsfällen in verschiedenen Branchen über fahrerlose Autos hinaus.
Autonome Plattformen in extremen Umgebungen
Wo werden autonome Plattformen heute entwickelt, getestet und tatsächlich eingesetzt? Hier sind Beispiele dieser Systeme, die Interface bekannt sind.
Unterseeische Energie und Infrastruktur
- Pipeline-Integrität: Schwärme von autonomen Unterwasserfahrzeugen (AUVs) überwachen kontinuierlich Tiefsee-Öl- und Gaspipelines, um Risse oder Lecks mithilfe von Echtzeit-Kraft- und visuellen Daten zu erkennen.
- Wellenkopf-Wartung: Autonome Systeme führen geschickte Reparaturen und Ventilanpassungen an Unterwasser-Ausrüstung durch, wo hoher hydrostatischer Druck menschliches Tauchen verhindert.
Nukleare Stilllegung und Energie
- Strahlungskartierung: Bodenfahrzeuge, die mit mehrachsigen Sensoren ausgestattet sind, navigieren autonom durch kontaminierte Zonen, um Alpha-, Beta- und Gammastrahlung zu kartieren, ohne Bediener zu gefährden.
- Reaktorinspektion: Kleinformatige Roboter navigieren durch das Innere von Kernreaktoren, um Strukturfliesen und Stützsysteme in Hochtemperatur- und Hochstrahlungszonen zu inspizieren.
Bergbau und unterirdische Erkundung
- Autonomes Bohren: Großformatige robotische Bohrplattformen nutzen Kraftsensoren, um den Bohrerdruck und die Bohrlochplatzierung bei Tiefbohroperationen zu optimieren.
- Such- und Rettungsdienste (SAR): Laufroboter erkunden instabile, rauchgefüllte oder eingestürzte Tunnel, um Überlebende zu lokalisieren und gefährliches unterirdisches Gelände nach Industrieunfällen zu kartieren.
Luft- und Raumfahrt sowie Weltraumforschung
- Planetare Rover: Autonome Plattformen navigieren über unregelmäßiges, schwerkraftarmes Gelände, um geologische Proben zu sammeln und Strukturtests auf außerirdischen Oberflächen durchzuführen, wie in unserer Anwendung Rover-Rad-Drehmomentüberwachung hervorgehoben.
- Hochhöhen-Wettersensorik: Autonome UAVs messen extreme Aufwinde und Windgeschwindigkeiten in der Nähe vulkanischer Aktivitäten, um atmosphärische Vorhersagen und Katastrophenprävention zu verbessern.
Industrielle Dekontamination
- Handhabung gefährlicher Abfälle: Autonome mobile Manipulatoren identifizieren, heben und transportieren chemische oder biologische Abfälle in abgedichteten Umgebungen und gewährleisten eine präzise Lastverteilung, um Verschüttungen zu verhindern.
- Raffinerie-Sicherheit: Autonome „Roboterhunde“ patrouillieren in gefährlichen Verarbeitungsanlagen, um Gaslecks und strukturelle Ermüdung in Bereichen mit eingeschränktem menschlichem Zugang zu überwachen.
Entdeckung der Herausforderungen und Lösungen autonomer Plattformen
Maritime autonome Rettungsfahrzeuge
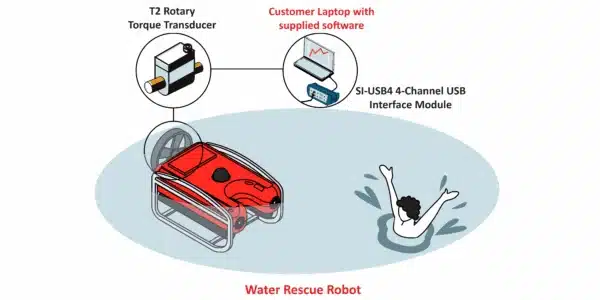
Bei Such- und Rettungseinsätzen müssen autonome Unterwasserfahrzeuge (AUVs) extremem hydrostatischem Druck standhalten und gleichzeitig einen präzisen Antrieb aufrechterhalten. Die Herausforderung liegt in der Unvorhersehbarkeit der Umgebung. Propeller und Triebwerke stoßen auf unterschiedlichen Wasserwiderstand und hydrodynamische Lasten, die zu mechanischer Ermüdung oder katastrophalem Versagen führen können, wenn sie nicht überwacht werden.
Um diese Herausforderung zu lösen, verwenden Ingenieure den Interface T2 Ultra Precision Shaft-Style rotierenden Drehmomentaufnehmer. Dieser Sensor ist für kontaktlose Datenübertragung konzipiert und ermöglicht die Drehmomentmessung während des Hochgeschwindigkeits-Triebwerksbetriebs (bis zu 15.000 RPM) mit einem kombinierten Fehler von 0,1%. In Kombination mit dem SI-USB4 4-Kanal-USB-Schnittstellenmodul liefert das System einen hochauflösenden 16-Bit-Datenstrom direkt an die Steuereinheit des AUV. Dieses Echtzeit-Feedback ermöglicht es dem autonomen System, den Energieverbrauch zu optimieren und die Triebwerksleistung dynamisch anzupassen, um den Missionserfolg in den weiten Bereichen des Ozeans zu gewährleisten. Lesen Sie: Wasserrettungsroboter.
Terrestrische Inspektionen erfordern Stabilität in Gefahrenzonen
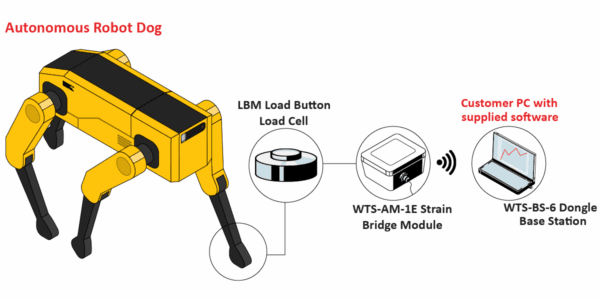
Die Öl- und Gasindustrie setzt zunehmend auf autonome vierbeinige „Roboterhunde“, um Raffinerien und Offshore-Plattformen zu inspizieren. Diese Umgebungen zeichnen sich durch unebene Stahlgitter, steile Treppen und rutschige Oberflächen aus, bei denen ein einziger Fehltritt zum Verlust teurer Ausrüstung oder zu einer Sicherheitsgefahr führen könnte.
Ingenieure haben die Interface LBM Compression Load Button Load Cell in die Füße dieser robotischen Erkunder integriert. Trotz ihrer kompakten Bauweise können diese Edelstahlsensoren Kapazitäten von bis zu 50.000 lbf bewältigen und liefern wichtige Daten zu Bodenkontaktkräften und Gewichtsverteilung.
Die Verwendung des WTS-AM-1E Wireless Strain Bridge Transmitter hält den Roboter vollständig kabellos. Die Daten werden über einen WTS-BS-6 Wireless Telemetry Dongle an eine entfernte Überwachungsstation gesendet, sodass die Onboard-KI des Roboters seine Gangart und Balance sofort anpassen kann, wenn er von flachem Beton auf raues Industriegelände wechselt. Erfahren Sie mehr in der Anwendungsnotiz Autonomer Roboterhund.
Der hybride Wandel zur Validierung mehrachsiger Belastungen
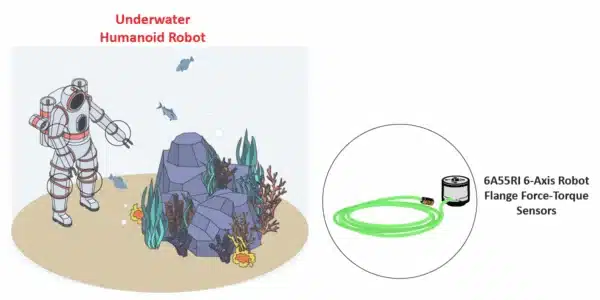
Einer der komplexesten Fortschritte ist der Aufstieg hybrider humanoider Roboter, die zwischen vollständig autonomen und ferngesteuerten Modi wechseln können. Diese Maschinen müssen mechanische Hochlastoperationen durchführen, wie das Drehen hartnäckiger Unterwasserventile oder den Betrieb schwerer Bergungswerkzeuge. Die Belastung der Robotergelenke während dieser Übergänge ist immens und multidirektional.
Um diese Komplexität zu bewältigen, bietet Interface den 6A55RI 6-Achsen-Roboterflansch-Kraft-Drehmoment-Sensor. Im Gegensatz zu Standardsensoren, die eine einzelne Kraft messen, erfasst der 6A55RI gleichzeitige Daten über drei Kraftachsen und drei Drehmomente. Direkt in die Gliedmaßenflansche des Roboters integriert, verwendet er eine EtherCAT P-Schnittstelle, um Strom und Hochgeschwindigkeitsdaten über ein einziges Kabel zu übertragen. Der Sensor stellt sicher, dass das Steuerungssystem des Roboters eine umfassende Karte der mechanischen Belastung an jedem Gelenk hat, Überdrehmoment verhindert und die Betriebslebensdauer der Plattform verlängert. Erfahren Sie mehr: Unterwasser-humanoider Roboter.
Entwicklung einer zuverlässigen autonomen Zukunft
Die von Interface-Wägezellen, Drehmomentaufnehmern und mehrachsigen Sensoren für gefährliche Umgebungen gelieferten Daten sind speziell für die Anforderungen extremer Umgebungen und autonomer Plattformen entwickelt. Durch die Integration dieser robusten Technologien verkürzen Entwickler die Entwicklungszyklen und erhöhen die Zuverlässigkeit missionskritischer Anwendungen.
TIPP: Erfahren Sie mehr in unserem Hazardous Locations ATEX 101.
Ob es sich um eine Unterwasser-Drohne oder einen terrestrischen Inspektor handelt, das Ziel bleibt dasselbe: die physikalischen Daten bereitzustellen, die für das Gedeihen der Autonomie erforderlich sind, das Risiko für Menschen und unsere Welt zu reduzieren.