Interface-Sensoren für die Entwicklung und Prüfung von chirurgischen Robotern
Die elektromechanischen und softwaretechnischen Fortschritte in der Medizintechnik und im Gesundheitswesen haben alle Arten von chirurgischen Robotern zur Realität werden lassen. Hersteller und Konstrukteure dieser Roboter wenden sich während der Phasen der Forschung und Entwicklung, der Produktentwicklung und -verfeinerung sowie der Tests an Interface, um chirurgische Anwendungsfälle zu perfektionieren. Die von uns angebotenen Sensortechnologien werden in diesen Prozessen und bei der endgültigen Integration bevorzugt, da diese Geräte stark reguliert sind und ein Höchstmaß an Genauigkeit und Zuverlässigkeit erfordern.
Zu den Operationen, die heute mit Hilfe von Robotern durchgeführt werden, gehören Eingriffe, die früher als invasiv und mit einem höheren Risiko des Scheiterns behaftet galten, wie z. B. koronare Bypässe, die Entfernung von Krebsgewebe, Transplantationen, Lasereingriffe und vieles mehr. Bei der Chirurgierobotik verlassen sich die Mediziner auf Präzision, um diese Eingriffe so schonend wie möglich durchzuführen.
Der Produktentwicklungsprozess für die Chirurgierobotik ist äußerst akribisch und erfordert eine Vielzahl von Tests, um die Genauigkeit des Produkts zu bestätigen. Eine der wichtigsten Komponenten der Tests in diesem Bereich ist die Kraftmessung. Wie Sie sich vorstellen können, spielt die Kraft in der chirurgischen Robotik eine große Rolle. Jede ausgeführte Aktion muss zwangsgetestet werden, um sicherzustellen, dass der Roboter jede chirurgische Aufgabe mit Präzision ausführt.
In der chirurgischen Robotik müssen winzige Kräfte gemessen werden, da sie mit sehr empfindlichen Objekten im menschlichen Körper arbeiten. Um diese winzigen Kräfte zu messen, bietet Interface eine Reihe von Interface Mini™-Lösungen an. Die Mini-Kraftmessdosen von Interface werden eingesetzt, wenn sie leicht zu berühren sind, wenig Gewicht haben oder wenig Platz benötigen. Unsere Miniatur-Kraftmessdosen liefern äußerst genaue Messungen, die denen unserer Kraftmessdosen in voller Größe mit proprietären legierten Dehnungsmessstreifen ähneln. Sie werden in der Forschung und Entwicklung, bei Tests und für den OEM-Einsatz in Roboterkomponenten verwendet.
Alle unsere Miniatur-Stablastzellen, Lastknöpfe, Lastscheiben, Miniatur-Zugkraft-Kraftmessdosen, S-Typ-Kraftmessdosen und versiegelten Edelstahl-Kraftmessdosen werden aufgrund ihrer Kapazität und ihres Designs häufig verwendet. Eine Vielzahl unserer Wägezellen kann in einer Standardanwendung verwendet werden. Unsere Ingenieure können auch mit Ihnen zusammenarbeiten, um kundenspezifische Wägezellen zu entwickeln, die genau Ihren Anforderungen entsprechen, was in der Robotik üblich ist.
Interface hat vor kurzem einen Anwendungshinweis entwickelt, in dem beschrieben wird, wie die Kraftmessung bei der Prüfung der Kraftrückführung mit einer Kombination aus Kraftmesszellen, Drehmomentaufnehmer und Datenerfassungsgerät an einem chirurgischen Robotergerät eingesetzt werden kann.
Kraftrückmeldung in der Roboterchirurgie
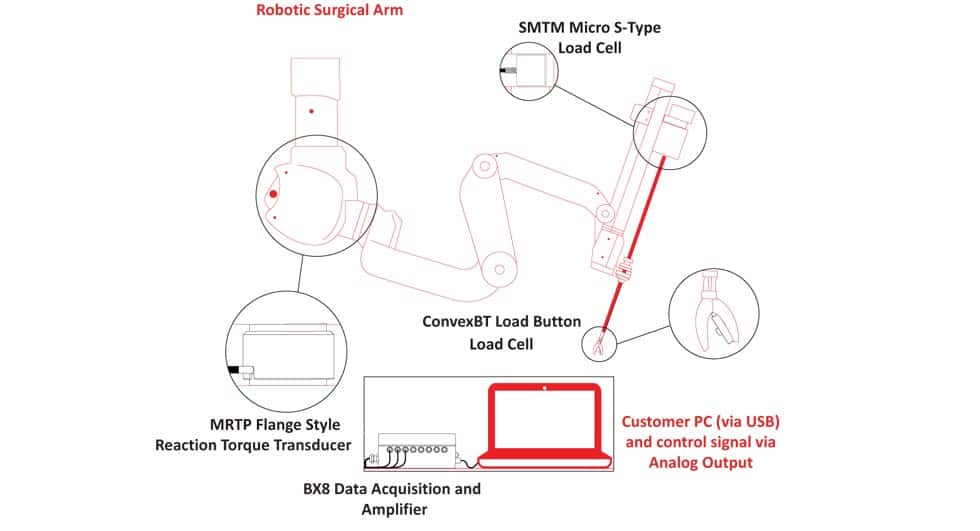
Ein biomechanisches Medizinunternehmen wollte die Kraft, das Drehmoment und das taktile Feedback seines Roboterarms für invasive Eingriffe testen. Die Bewegungen des Chirurgen werden während der Operation vom Roboterarm gespiegelt, und es war wichtig, dass alle haptischen Kraftrückmeldungen gemessen werden, um die Sicherheit bei invasiven Eingriffen zu gewährleisten. Eine Reihe von Interface-Produkten zur Kraft- und Drehmomentmessung wurden für diesen Roboterarm vorgeschlagen. Dazu gehören unsere Lastknöpfe, S-Typen, Mini-Drehmomentaufnehmer mit Überlastschutz und DAQ-Instrumente. Im Folgenden werden die Funktionen der einzelnen Geräte beschrieben:
- ConvexBT Load Button Load Cell:
Wird zur Messung der Kraft spezifischer chirurgischer Werkzeuge, wie Klemmen und Zangen, verwendet. - SMTM Micro S-Type Load Cell:
Wird am Mechanismus der Werkzeugbefestigung angebracht und kann die genauen Kräfte messen, die auf chirurgische Werkzeuge wirken. - MRTP Miniatur-Reaktionsdrehmomentaufnehmer mit Überlastschutz und Flansch:
Wird zwischen dem Motor und dem Gelenk des Roboterarms montiert, um das Drehmoment der Bewegungen des Arms zu messen. - BX8 8-Kanal-Datenerfassungssystem und -Verstärker:
Die Ergebnisse aller drei Kraftsensoren können mit dem BX8 angezeigt und aufgezeichnet werden.
Jeder der Kraft- oder Drehmomentaufnehmer von Interface trägt dazu bei, die Sicherheit und Funktionalität von Roboterarmen während invasiver Eingriffe zu gewährleisten. Das vom Roboterarm gemessene Kraft-Feedback stellte sicher, dass der Roboter bei der Verwendung von chirurgischen Werkzeugen, die bei Operationen Einschnitte erzeugen, die perfekte Kraft aufbrachte. Außerdem wurde das erzeugte Drehmoment gemessen, um sicherzustellen, dass sich der Roboterarm reibungslos und mit der richtigen Geschwindigkeit bewegt. Lesen Sie den Anwendungsbericht für diesen chirurgischen Roboter hier.
Dies ist nur ein Beispiel für die Arbeit von Interface im Bereich der Robotik, insbesondere der chirurgischen Robotik. Es gibt eine wachsende Zahl von Geräten, die in speziellen, präzisen Operationen eingesetzt werden und die Kraft zur Erfüllung ihrer Aufgabe nutzen.