Granulare Dynamik der artikulierten Robotersensorik
 Während die primäre Struktur eines Roboters dessen Reichweite bestimmt, entscheiden die einzelnen Komponenten an den Kontakt- und Gelenkpunkten über den Erfolg komplexer Bewegungsabläufe.
Während die primäre Struktur eines Roboters dessen Reichweite bestimmt, entscheiden die einzelnen Komponenten an den Kontakt- und Gelenkpunkten über den Erfolg komplexer Bewegungsabläufe.
Mehrachsige Sensoren sind ideal für die Prüfung der strukturellen Anatomie eines Roboters, einschließlich seiner Gelenke, Greifer und spezialisierter Endeffektoren. Die Robotertransformation hat grundlegend verändert, wie Konstrukteure und Robotertestlabore an Präzision herangehen – der Fokus verschiebt sich von der Prüfung einzelner, isolierter Komponenten hin zur Messung der Artikulation selbst. Roboter erfordern detaillierte Analysen und präzise Messungen der mechanischen Bewegung, während diese in eine wahrnehmende Interaktion umgewandelt wird.
Die Entwicklung des Robottestens: Von Einachsen- zu Mehrachsensensoren
Die Entwicklung der Industrierobotik hat sich von starrer, blinder Wiederholung hin zu dynamischer, sensorgestützter Interaktion gewandelt. Frühe Robotersysteme waren weitgehend durch ihre mechanischen Grenzen definiert: einfache kartesische oder Portalsysteme, die zwischen festen Koordinaten mit hoher Wiederholbarkeit, jedoch ohne jegliches Umgebungsbewusstsein bewegten. Diese Maschinen der ersten Generation stützten sich auf einfache Endschalter und Encoder, die ausschließlich die Position erfassten – in der Annahme einer statischen Welt, in der jedes Teil genau dort war, wo es programmiert worden war.
Mit steigendem Bedarf der Industrie nach höherem Durchsatz und der Fähigkeit, komplexere, nicht-lineare Aufgaben zu bewältigen, entwickelten sich diese einfachen Robotertypen weiter. Roboter wuchsen von starren Rahmen zu mehrgliedrigen, artikulierten Strukturen, die menschliche Bewegungen nachahmen – und erforderten damit einen grundlegenden Wandel: weg vom einfachen Überwachen der Roboterposition, hin zum Erfassen der Interaktion.
Es geht nicht länger nur um die einfache Messung der Genauigkeit eines Motors. Roboter von heute erfordern eine detaillierte Sensorerfassung über mehrere Bewegungsachsen hinweg. Während Robottests früher eine einzelne Kraftmessdose zur Überprüfung vertikaler Kräfte verwendeten, definieren Ingenieure die Artikulation heute mithilfe synchronisierter Daten von 3-Achs- und 6-Achs-Sensoren, die an jedem Schwenk- und Greifpunkt eingebettet sind. Dieser Übergang stellt sicher, dass das System, während ein Roboterarm greift, dreht und fasst, nicht nur einem Pfad folgt – sondern die sich verändernden Schwerpunkte, Reibungswiderstände und Kontaktkräfte in Echtzeit wahrnimmt.
Roboterkomponenten, die Mehrachsentests erfordern
Um die Langlebigkeit und Sicherheit dieser Systeme zu gewährleisten, müssen einzelne Komponenten rigoros in mehreren Achsen getestet werden, um die nichtlinearen Kräfte realer Einsatzbedingungen zu simulieren. Hier sind fünf Beispiele für Roboterkomponenten, die mehrachsige Sensoren für Tests und die Überwachung der Leistung einsetzen:
- Roboterflansche und Handgelenke: Prüfung der Montageschnittstelle zwischen Arm und Endeffektor, um sicherzustellen, dass sie kombinierten Torsions- und Axiallasten bei Hochgeschwindigkeits-Pick-and-Place-Zyklen standhält.
- Dreh- und Schwenkgelenke: Validierung, dass interne Lager und Motorgehäuse Momentlasten bewältigen können – also Torsionskräfte, die auftreten, wenn der Arm vollständig ausgestreckt ist oder eine versetzte Nutzlast trägt.
- Mehrfinger-Greifer und End-of-Arm Tooling (EOAT): Beurteilung der Empfindlichkeit miniaturisierter 3-Achs-Sensoren, um sicherzustellen, dass sie seitliches Gleiten und Kontaktkräfte genau erfassen – ohne Störung durch den eigenen Klemmmechanismus des Greifers.
- Haptische Feedback-Steuerungen: Prüfung der bidirektionalen Kraftreaktion in chirurgischen oder ferngesteuerten Roboter-Griffen, um sicherzustellen, dass der Bediener präzise taktile Daten erhält.
- Basisauflagen und Nivellierfüße: Einsatz von 3-Achs-Kraftmessplatten am Fundament des Roboters zur Überwachung von Schwerpunktverlagerungen und zur Sicherstellung der Systemstabilität unter Spitzendynamiklasten.
Dieses Maß an granularer Analyse – von Humanoiden bis zu Unterwasser-Explorern – wird durch die Integration von Interfaces mehrachsigen Sensoren mit spezialisierter Instrumentierung und Software ermöglicht.
Intelligente Endeffektoren und Greifer
Die Schnittstelle zwischen einem Roboter und seinem Werkstück ist der kritischste Punkt für die mehrachsige Datenintegration. Greifer, die mit Kraft-Drehmoment-Sensoren ausgestattet sind, gehen über einfache Öffnen-Schließen-Logik hinaus und ermöglichen variables Kraftspannen.
- Greifmessungen in kompaktem End-of-Arm Tooling (EOAT) lassen sich mit dem Interface 3A40 Miniature 3-Axis Load Cell leichter auswerten. Dieser Sensor liefert das notwendige vertikale Kraft-Feedback und die seitliche Widerstandserkennung, ohne nennenswert Masse hinzuzufügen. So können Greifer empfindliche Elektronik oder medizinische Fläschchen mit kalibriertem Griff handhaben und strukturelle Verformungen verhindern. Hier ein Beispiel, wie eine Roboterhand mit Mehrachsensensoren getestet wird:
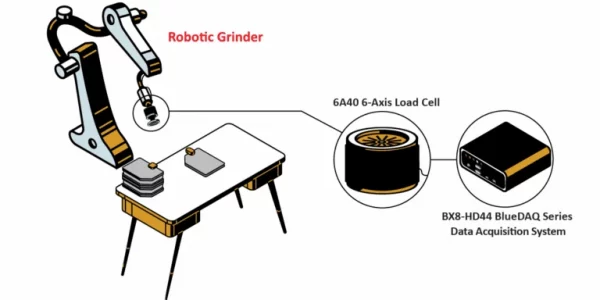
- Schlupferkennung erfordert eine Hochgeschwindigkeitsverarbeitung, um Mikrovibrationen und Scherkräfte zu identifizieren, die einem Gleiten vorausgehen. Mehrachsige Sensoren können vollständige Echtzeit-Datenansichten dieser Kräfte liefern. Durch den Einsatz eines Interface BX8-HD44 BlueDAQ Series Datenerfassungssystems können Roboterkonstrukteure Mehrkanalssignale gleichzeitig verarbeiten und den Regler in Millisekunden zur Erhöhung der Klemmkraft veranlassen.
Kraftbewusste artikulierte Gelenke
Bei Robotern mit drehenden oder schwenkenden Elementen liefern in die Gelenke integrierte Sensoren eine zusätzliche Telemetrieschicht, die über Standard-Motorencoder hinausgeht.
- Komplexe Lastüberwachung mit 6-Achs-Kraftmessdosen, die am Handgelenk oder an den wichtigsten Schwenkpunkten eines Roboterarms platziert werden, misst alle drei Kraftvektoren und alle drei Momente. Dies stellt sicher, dass das Gelenk zwischen dem beabsichtigten Nutzlastgewicht und unbeabsichtigten Drehmomenten durch externe Hindernisse oder mechanische Blockaden unterscheiden kann.
- Dynamische Schwerpunkt (CoG)-Kompensation: Während ein Arm seinen Bewegungsbereich durchläuft, wird dies vom Mehrachsensensor gemessen. Das BX8 DAQ-System führt Echtzeitskalierung und mathematische Kanalberechnungen durch. Dies ermöglicht es dem System, das bekannte Gewicht des Arms (Tara) abzuziehen, um die exakten auf das Werkstück wirkenden Kräfte zu isolieren – unabhängig von der Orientierung des Arms im 3D-Raum. Mehr dazu beim 6A Series BX8 Complete System.
Spezialisierte Bearbeitungsköpfe
Für Aufgaben wie Entgraten, Schleifen oder Polieren wird der Werkzeugkopf selbst zu einer sensorbestückten Komponente.
- Oberflächenkonturierung bei Endbearbeitungsvorgängen erfordert eine konstante Kraft gegen eine gekrümmte Oberfläche, was mit starrer Programmierung schwierig umzusetzen ist. Ein Werkzeugkopf mit einem Interface 3-Achs-Sensor liefert Rückmeldung über die Normalkraft (die senkrecht zur Oberfläche wirkende Kraft). Dies stellt sicher, dass das Werkzeug beim Überfahren eines komplexen Bauteils das Material weder einkerbt noch abhebt – und so ein gleichmäßiges Finish erzielt. Ein weiteres Beispiel für Roboter im Bereich der Endbearbeitung findet sich in unserer Anwendung Robotisches Schleifen und Polieren.
- Werkzeugverschleiß-Diagnose: Durch den Einsatz der BlueDAQ-Software können Ingenieure Veränderungen im Drehmoment-Kraft-Verhältnis überwachen. Ein Anstieg des Rotationswiderstands (Drehmoment) ohne entsprechende Zunahme der Druckkraft deutet häufig auf Werkzeugstumpfheit oder Materialaufbau hin – und ermöglicht einen vorausschauenden Werkzeugwechsel, bevor die Teilequalität beeinträchtigt wird.
Aktive Aufhängungen und Basismodule
Bei großformatigen Robotern regelt die Sensorik auf Fundament- oder Fahrwerksebene die Physik schneller Bewegungen.
- Trägheit und Stabilität bei schneller Verzögerung können zu einer Verschiebung einer schweren Last führen und komplexe Kraftpaare erzeugen. Interface Mehrachsensensoren, die an der Montageschnittstelle zwischen Basis und Roboterwerkzeug installiert sind, erfassen diese Trägheitsverschiebungen. Diese Daten ermöglichen es dem Roboter, seine Beschleunigungskurven dynamisch anzupassen und Schwingungen zu dämpfen, die zu mechanischer Ermüdung führen könnten.
- Navigation und Hinderniserkennung auf mobilen Plattformen: In einen mobilen Roboter integrierte Mehrachsensensoren liefern kritische Daten. Wenn ein Roboter auf ein kleineres Bodenhindernis trifft, erkennt der Sensor den Aufprallvektor und die -magnitude und ermöglicht dem System zu entscheiden, ob ein sicheres Weiterfahren möglich ist oder ein Notstopp erforderlich wird.
Durch den Fokus auf die granularen Daten, die an jedem Gelenk und jeder Fingerkuppe erzeugt werden, bewegt sich die Industrie über einfache Automatisierung hinaus – hin zu wirklich intelligenten, taktilen Maschinen. Durch die Integration hochpräziser Mehrachsensensoren und synchronisierter Datenerfassung wird die nächste Generation der Robotik nicht nur schneller und stärker agieren, sondern auch jenes nuancierte Tastgefühl entwickeln, das zur Navigation in einer zunehmend komplexen physischen Welt notwendig ist.